A projected coordinate system is defined on a flat, two-dimensional surface. Unlike a geographic coordinate system, a projected coordinate system has constant lengths, angles, and areas across the two dimensions. A projected coordinate system is always based on a geographic coordinate system that is based on a sphere or spheroid.
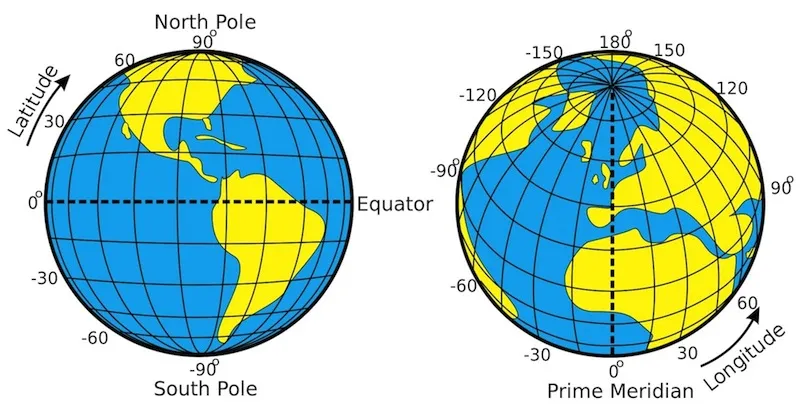
In a projected coordinate system, locations are identified by x, y coordinates on a grid, with the origin at the center of the grid. Each position has two values that reference it to that central location. One specifies its horizontal position and the other its vertical position. The two values are called the x-coordinate and y-coordinate. Using this notation, the coordinates at the origin are x = 0 and y = 0.
On a gridded network of equally spaced horizontal and vertical lines, the horizontal line in the center is called the x-axis and the central vertical line is called the y-axis. Units are consistent and equally spaced across the full range of x and y. Horizontal lines above the origin and vertical lines to the right of the origin have positive values; those below or to the left have negative values. The four quadrants represent the four possible combinations of positive and negative X and Y coordinates.
Map Projection
A map projection is used to portray all or part of the round Earth on a flat surface. This cannot be done without some distortion. Whether you treat the earth as a sphere or a spheroid, you must transform its three-dimensional surface to create a flat map sheet.
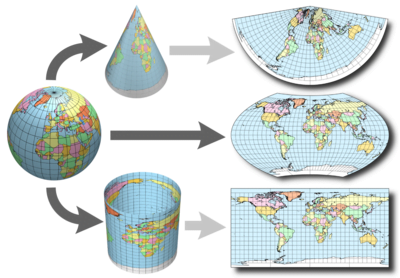
One easy way to understand how map projections alter spatial properties is to visualize shining a light through the earth onto a surface, called the projection surface. Imagine the earth’s surface is clear with the graticule drawn on it. Wrap a piece of paper around the earth. A light at the center of the earth will cast the shadows of the graticule onto the piece of paper. You can now unwrap the paper and lay it flat. The shape of the graticule on the flat paper is different from that on the earth. The map projection has distorted the graticule.
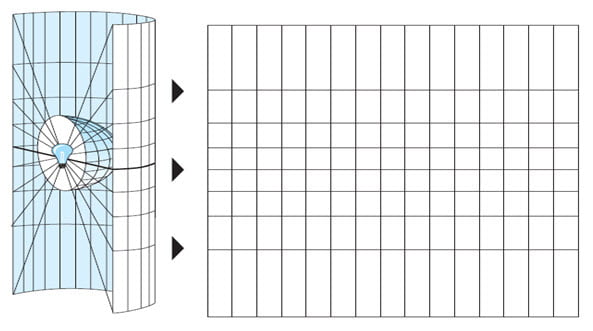
A map projection uses mathematical formulae to relate spherical coordinates on the globe to flat, planar coordinates. Different projections cause different types of distortions. Some projections are designed to minimize the distortion of one or two of the data’s characteristics. A projection could maintain the area of a feature but alter its shape. In the graphic above, data near the poles is stretched.
Major Map Projections
The three major types of projections developed from this method are the:
- Conic
- Planar
- Cylindrical
Conic Projections
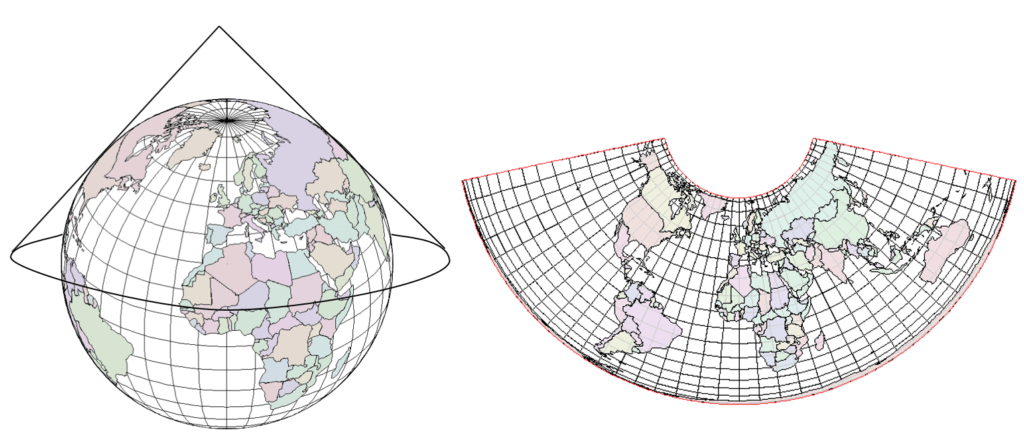
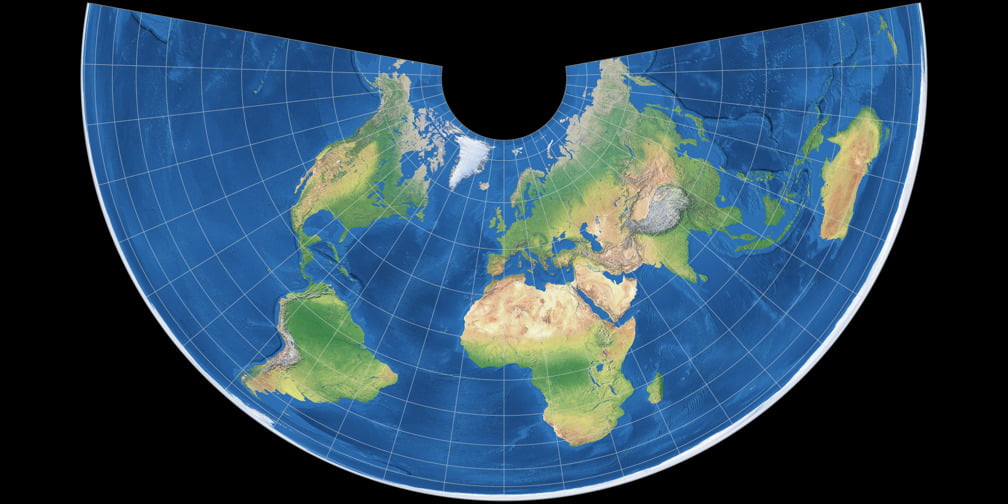
In conic projections, points from the globe graticule are transferred to a cone which has been enveloped around the sphere. The cone is then unrolled into a flat plane. The normal aspect is the north or south pole where the axis of the cone (the point) coincides with the pole. Conic projections can only represent one hemisphere, or a portion of one hemisphere, for the cone does not extend far beyond the center of the sphere. Conic projections are often used to project areas that have a greater east-west extent than north-south, e.g., the United States. When projected from the center of the globe, the typical grid appearance for Conic projections shows parallels forming arcs of circles facing up in the Northern Hemisphere and down in the Southern Hemisphere; and meridians are either straight or curved and radiate outwards from the direction of the point of the cone (Laurie A. B. Garo, 1997, Introduction to Map Projections).
The simplest conic projection is tangent to the globe along a line of latitude. This line is called the standard parallel. The meridians are projected onto the conical surface, meeting at the apex, or point of the cone. Parallel lines of latitude are projected onto the cone as rings. The cone is then ‘cut’ along any meridian to produce the final conic projection, which has straight converging lines for meridians and concentric circular arcs for parallels. The meridian opposite the cut line becomes the central meridian.
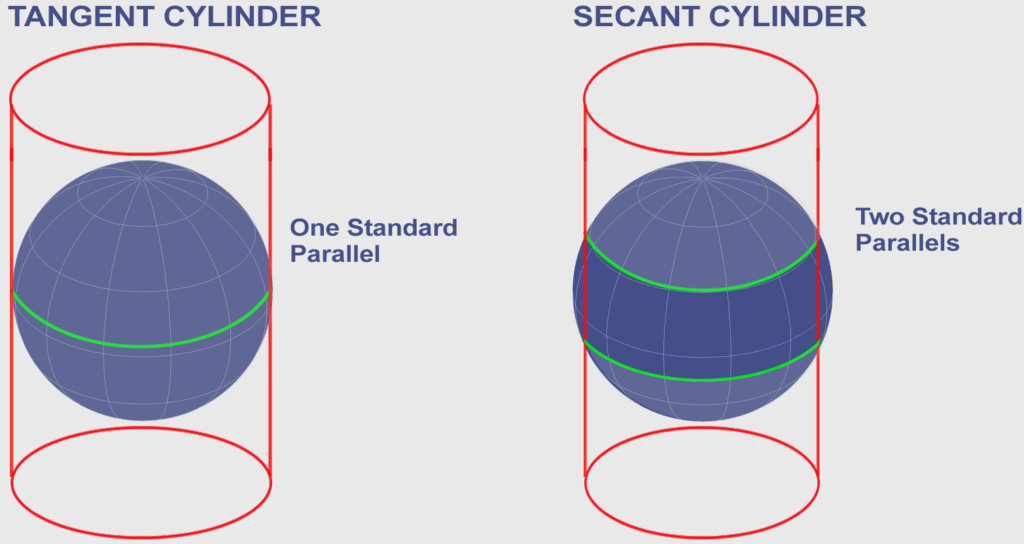
Conic projections are used for mid latitude zones that have an east-to-west orientation. Somewhat more complex conic projections contact the global surface at two locations. These projections are called secant conic projections and are defined by two standard parallels. It is also possible to define a secant projection by one standard parallel and a scale factor. The distortion pattern for secant projections is different between the standard parallels. Generally, a secant projection has less overall distortion than a tangent case. On still more complex conic projections, the axis of the cone does not line up with the polar axis of the globe. These are called oblique.
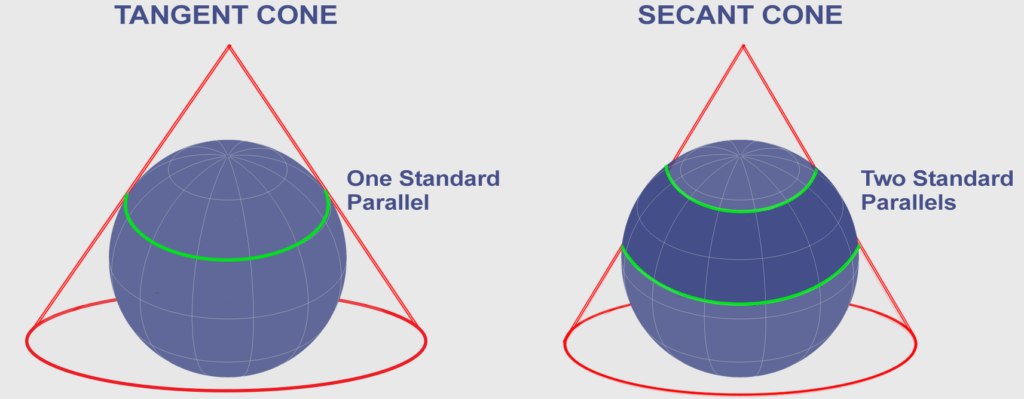
With the tangent case, a cone is placed over a globe. The cone and globe meet along a latitude line. This is the standard parallel. The cone is cut along the line of longitude that is opposite the central meridian and flattened into a plane.
In secant case, a cone is placed over a globe but cuts through the surface. The cone and globe meet along two latitude lines. These are the standard parallels. The cone is cut along the line of longitude that is opposite the central meridian and flattened into a plane.
The representation of geographic features depends on the spacing of the parallels. When equally spaced, the projection is equidistant in the north–south direction but neither conformal nor equal area such as the Equidistant Conic projection. For small areas, the overall distortion is minimal. On the Lambert Conformal Conic projection, the central parallels are spaced more closely than the parallels near the border, and small geographic shapes are maintained for both small-scale and large-scale maps. Finally, on the Albers Equal Area Conic projection, the parallels near the northern and southern edges are closer together than the central parallels, and the projection displays equivalent areas.

Cylindrical Projections
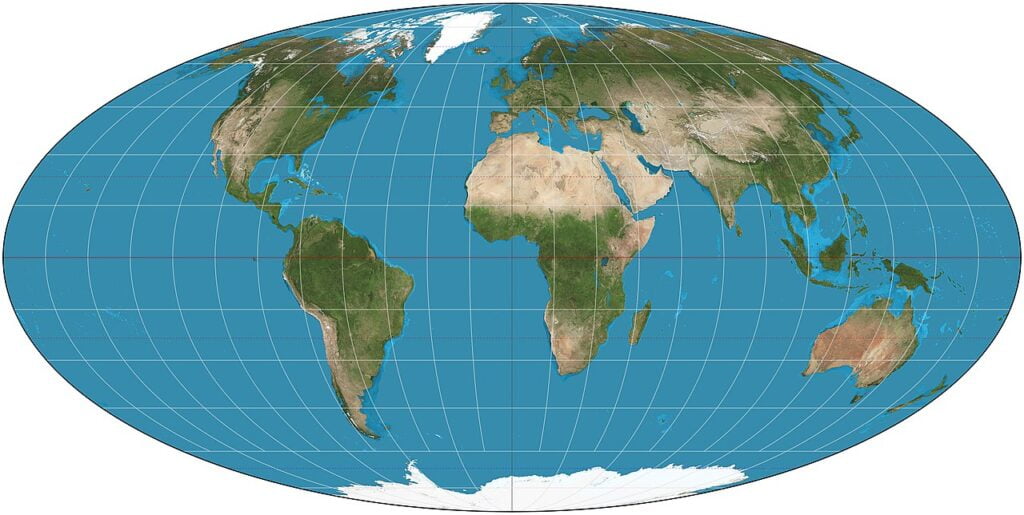
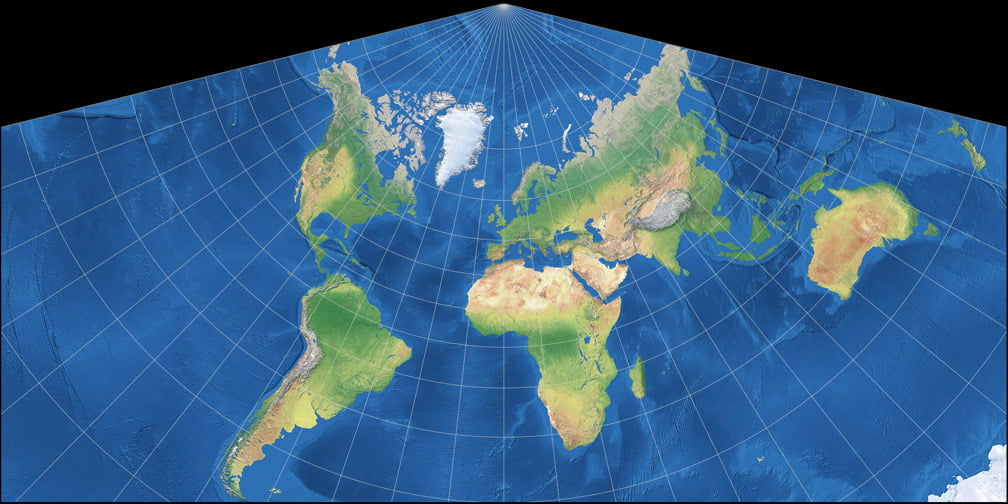
Cylindrical projections are formed by wrapping a large, flat plane (e.g., a large sheet of paper) around the globe to form a cylinder. The points on the spherical grid are transferred to the cylinder which is then unfolded into a flat plane. The equator is the “normal aspect” or viewpoint for these projections. This family of projections are typically used to represent the entire world. When projected from the center of the globe with the normal aspect, the typical grid appearance for cylindrical projections shows parallels and meridians forming straight perpendicular lines. The spacing varies depending on the type of cylindrical projection.
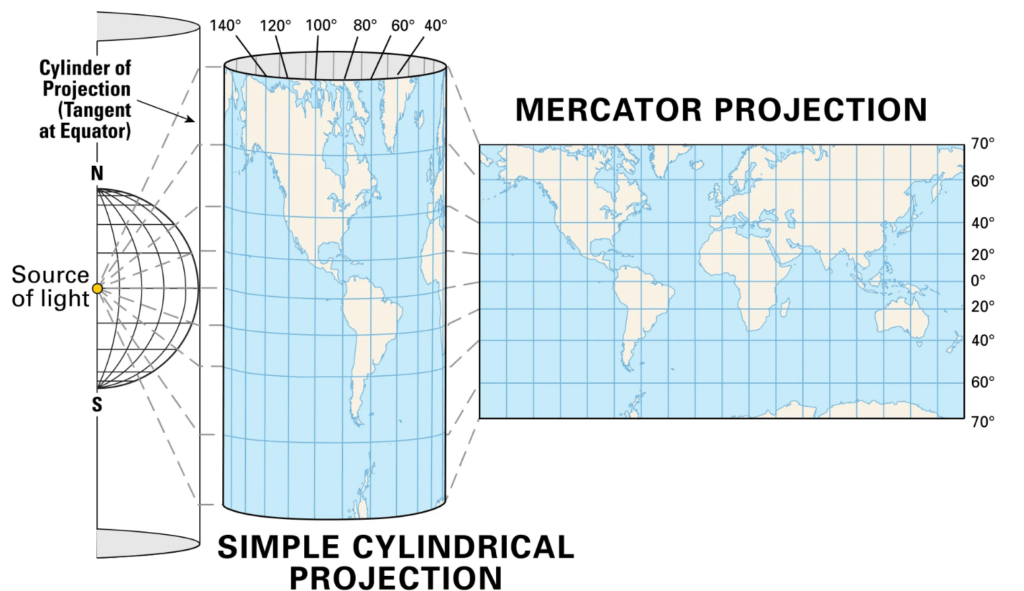
Above image shows an example of a cylindrical map projection and it is one of the most famous projections ever developed. It was created by a Flemish cartographer and geographer – Geradus Mercator in 1569. It is famous because it was used for centuries for marine navigation. The sole reason for this is that any line drawn on the map was a true direction. However, shapes and distances were distorted. Notice the huge distortions in the Arctic and Antarctic regions, but the reasonable representation of landmasses out to about 50° north and south.
Cylindrical projections can also have tangent or secant cases. The Mercator projection is one of the most common cylindrical projections, and the equator is usually its line of tangency. Meridians are geometrically projected onto the cylindrical surface, and parallels are mathematically projected, producing graticule angles of 90 degrees. The cylinder is ‘cut’ along any meridian to produce the final cylindrical projection. The meridians are equally spaced, while the spacing between parallel lines of latitude increases toward the poles. This projection is conformal and displays true direction along straight lines. Rhumb lines, lines of constant bearing, but not most great circles, are straight lines on a Mercator projection (Kennedy, 1994).
For more complex cylindrical projections the cylinder is rotated, thus changing the tangent or secant lines. Transverse cylindrical projections such as the Transverse Mercator use a meridian as the tangential contact or lines parallel to meridians as lines of secants. The standard lines then run north and south, along which the scale is true. Oblique cylinders are rotated around a great circle line located anywhere between the equator and the meridians. In these more complex projections, most meridians and lines of latitude are no longer straight. of equidistance. Other geographical properties vary according to the specific projection.
The UNIVERSAL TRANSVERSE MERCATOR is also one of the most used projection systems. In this grid, the world is divided into 60 north-south zones, each covering a strip 6° wide in longitude. These zones are numbered consecutively beginning with Zone 1, between 180° and 174° west longitude, and progressing eastward to Zone 60, between 174° and 180° east longitude. In each zone, coordinates are measured north and east in meters. The northing values are measured continuously from zero at the Equator, in a northerly direction. To avoid negative numbers for locations south of the Equator, NIMA’s cartographers assigned the Equator an arbitrary false northing value of 10,000,000 meters. A central meridian through the middle of each 6° zone is assigned an easting value of 500,000 meters. Grid values to the west of this central meridian are less than 500,000; to the east, more than 500,000.
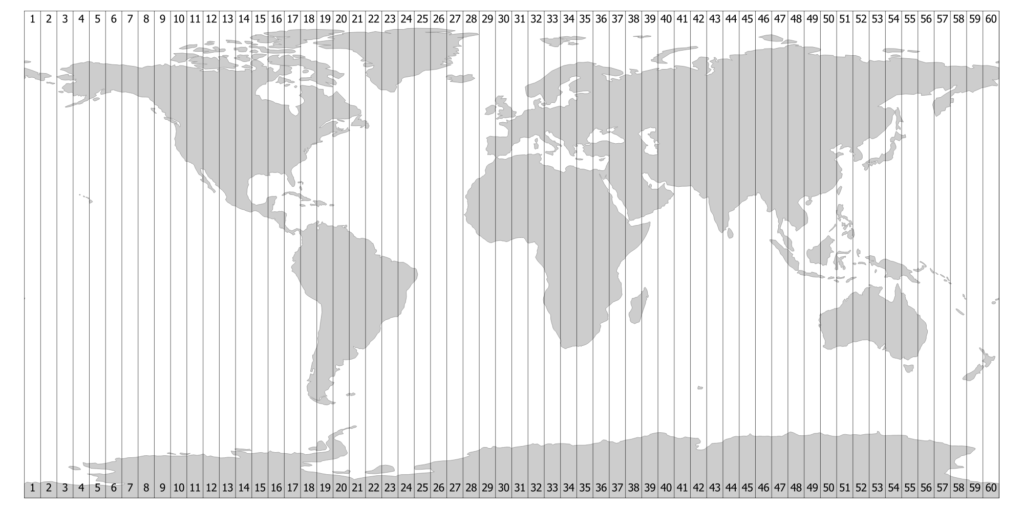
Nepal falls in UTM Zone 44N and 45N.
Planar or Azimuthal Projection
Azimuthalprojections, the spherical (globe) grid is projected onto a flat plane, thus it is also called a plane projection. The poles are the “normal aspect” (the viewpoint or perspective) which results in the simplest projected grid for this family of projections. That is, the plane is normally placed above the north or south pole. Normally only one hemisphere, or a portion of it, is represented on Azimuthal projections. When projected from the center of the globe with the normal aspect, the typical grid appearance for Azimuthal projections shows parallels forming concentric circles, while meridians radiate out from the center. (Laurie A. B. Garo, 1997, Introduction to Map Projections).
Planar projections project map data onto a flat surface touching the globe. This type of projection is usually tangent to the globe at one point but may be secant. The point of contact may be the North Pole, the South Pole, a point on the equator, or any point in between. This point specifies the aspect and is the focus of the projection. The focus is identified by a central longitude and a central latitude. Possible aspects are polar, equatorial, and oblique.
Polar aspects are the simplest form. Parallels of latitude are concentric circles centered on the pole, and meridians are straight lines that intersect at the pole with their true angles of orientation. In other aspects, planar projections will have graticule angles of 90 degrees at the focus. Directions from the focus are accurate. Great circles passing through the focus are represented by straight lines; thus, the shortest distance from the center to any other point on the map is a straight line. Patterns of area and shape distortion are circular about the focus. For this reason, azimuthal projections accommodate circular regions better than rectangular regions. Planar projections are used most often to map polar regions. Some planar projections view surface data from a specific point in space. The point of view determines how the spherical data is projected onto the flat surface. The perspective from which all locations are viewed varies between the different azimuthal projections. Perspective points may be the center of the earth, a surface point directly opposite from the focus, or a point external to the globe, as if seen from a satellite or another planet.
Azimuthal projections are classified in part by the focus and, if applicable, by the perspective point.
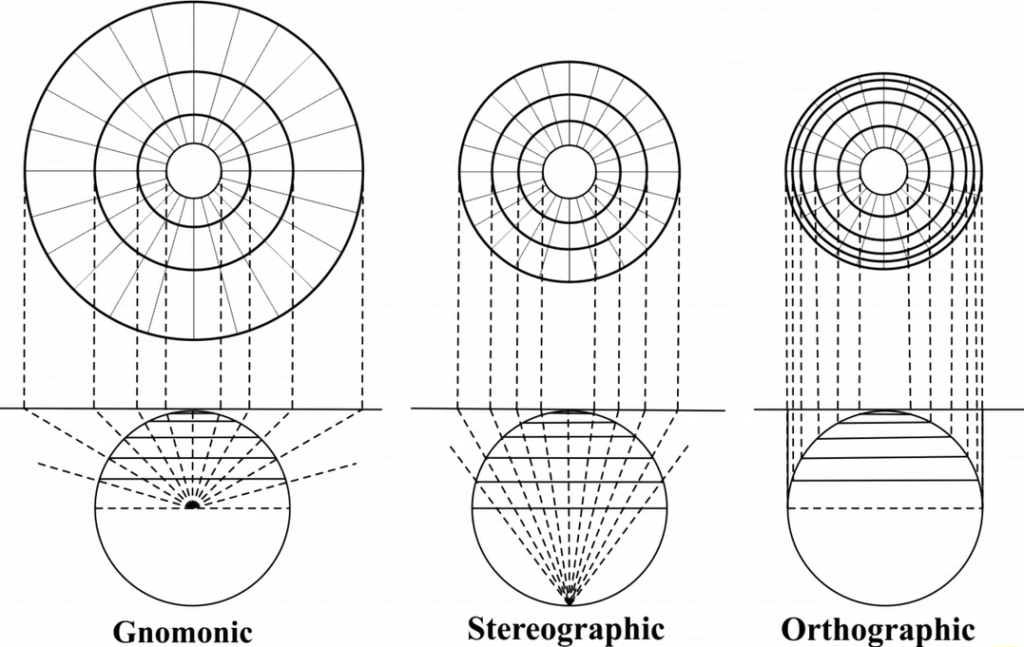
The graphic below compares three planar projections with polar aspects but different perspectives. The Gnomonic projection views the surface data from the center of the earth, whereas the Stereographic projection views it from pole to pole. The Orthographic projection views the earth from an infinite point, as if viewed from deep space. Note how the differences in perspective determine the amount of distortion toward the equator.
Projection Parameters
A map projection by itself isn’t enough to define a projected coordinate system. You can state that a dataset is in Transverse Mercator, but that’s not enough information. Where is the center of the projection? Was a scale factor used? Without knowing the exact values for the projection parameters, the dataset can’t be reprojected.
You can also get some idea of the amount of distortion the projection has added to the data. If you’re interested in Australia but you know that a dataset’s projection is centered at 0,0, the intersection of the equator and the Greenwich prime meridian, you might want to think about changing the center of the projection.
Each map projection has a set of parameters that you must define. The parameters specify the origin and customize a projection for your area of interest. Angular parameters use the geographic coordinate system units, while linear parameters use the projected coordinate system units.
Linear parameters
- False easting is a linear value applied to the origin of the x-coordinates.
- False northing is a linear value applied to the origin of the y-coordinates.
False easting and northing values are usually applied to ensure that all x- and y-values are positive. You can also use the false easting and northing parameters to reduce the range of the x- or y-coordinate values. For example, if you know all y-values are greater than 5,000,000 meters, you could apply a false northing of -5,000,000.
Angular parameters
- Azimuth defines the center line of a projection. The rotation angle measures east from north. This is used with the azimuth cases of the rectified skew orthomorphic, and Local projections.
- Central meridian defines the origin of the x-coordinates. Every projection has a central meridian, which is the middle longitude of the projection. In most projections, it runs down the middle of the map and the map is symmetrical on either side of it. It may or may not be a line of true scale. (True scale means no distance distortion.)
- Longitude of origin defines the origin of the x-coordinates. The central meridian and longitude of origin parameters are synonymous.
- Central parallel defines the origin of the y-coordinates.
- Latitude of origin defines the origin of the y-coordinates. This parameter may not be located at the center of the projection. In particular, conic projections use this parameter to set the origin of the y-coordinates below the area of interest. In that instance, you don’t need to set a false northing parameter to ensure that all y-coordinates are positive. Every projection also has a latitude of origin. The intersection of this line with the central meridian is the starting point of the projected coordinates. The latitude of origin may or may not be the middle latitude of the projection and may or may not be a line of true scale. The important thing to remember about the latitude and longitude of origin is that they don’t affect the distortion pattern of the map. All they do is define where the map’s x, y units will originate.
- Standard parallel 1 and standard parallel 2 are used with conic projections to define the latitude lines where the scale is 1.0. When defining a Lambert conformal conic projection with one standard parallel, the first standard parallel defines the origin of the y-coordinates. Not all projections have standard parallels, but many common ones do. In a few projections, like the Sinusoidal and the Polyconic, every line of latitude has true scale and is therefore a standard parallel.
For other conic cases, the y-coordinate origin is defined by the latitude of origin parameter.
- Longitude of first point
- Latitude of first point
- Longitude of second point
- Latitude of second point
The four parameters above are used with the two-point equidistant projections. They specify two geographic points that define the central axis of a projection.
Unitless parameters
- Scale factor is a unitless value applied to the center point or line of a map projection.
The scale factor is usually slightly less than one. The Universal Transverse Mercator (UTM) coordinate system, which uses the Transverse Mercator projection, has a scale factor of 0.9996. Rather than 1.0, the scale along the central meridian of the projection is 0.9996. This creates two almost parallel lines approximately 180 kilometers, or about 1°, away where the scale is 1.0. The scale factor reduces the overall distortion of the projection in the area of interest. Remember that no map has true scale everywhere.
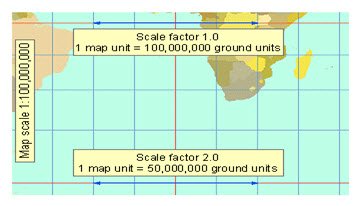
A line of true scale is defined as having a scale factor of 1.0. Along this line, the actual map scale is equal to the stated scale (there is no distortion of distance). A scale factor of 2.0 means that distance measurements on the map are twice too long—if your scale bar tells you it’s a hundred kilometers from A to B, it’s really only fifty kilometers. A scale factor of 0.5 means that distance measurements are twice too short.
You can use Compare Map Projections (map-projections.net) to compare between different projected coordinate systems to find their differences and select the one most appropriate for your project.